Digitize
| 工具列 | 功能表 |
|---|---|
|
|
工具 3‑D 测量手臂 > 连线 |
Digitize 指令可以连接与初始化 3D 测量手臂。
使用 3D 测量手臂入门
- 选择测量手臂的型号。
- 使用测量手臂在真实世界中取一点为原点。
- 使用测量手臂在真实世界中取另外一个点,定义 X 轴的方向。
- 使用量测手臂在真实世界中再取一点,定义 Y 轴的方向。
您不必在意您所取的 Y 轴是否与 X 轴垂直,Rhino 会自动将 Y 轴垂直于 X 轴。 - 在 Rhino 里取一点为原点。
- 按 Enter 键使用世界坐标系统。
- 在 Rhino 里指定 X 轴。
- 在 Rhino 里指定 Y 轴。
其它可与测量手臂配合使用的指令
无论什么时候,只要 Rhino 提示您取一点的时候就可以使用测量手臂。因此,所有在曲线功能表里的指令都可以用测量手臂为输入来源。您可以使用测量手臂画直线、圆弧、圆、曲线...,就如同使用鼠标一样。
代替脚踏板
DigClick 指令可以模拟踩下脚踏板取点的动作,F12 键预设为此指令的快速键,如果您觉得按 F12 取点比使用脚踏板方便,您可以使用 F12 键代替脚踏板。
测量大型物件
测量大型物件时,您可以先测量物件的一部分,标示一些参考点,再测量下一部分,标示的参考点要同时位于两个部分的测量范围内。
设定参考点
- 在物件上标示参考点
- 以工作桌校正测量手臂。
- 测量第一、二组参考点。
- 移动测量手臂至第二、三组参考点之间,使测量手臂可以同时测量到第二、三组参考点。
- 以第二组参考点校正测量手臂。
- 测量第三组参考点。
- 继续从一组参考点移动到下一组参考点,直到所有参考点都被数字化为止。
在 MicroScribe 上使用非标准探针
如果您的 MicroScribe 使用的是非标准探针,必需依照下列的说明编辑 mstip.dat 档,mstip.dat 文件里也有此编辑说明。
设定 MicroScribe 使用非标准探针
- 标准球形探针 (Ball Tip) 的长度比标准点探针 (Point Tip) 短了 0.242 英寸。
- 使用标准点探针时,设定 D5Delta = 0.0。
- 使用标准球形探针时,设定 D5Delta = 0.242。
- 如果您要使用非标准探针,请精确地测量此探针与标准点探针的长度差距 (英寸),并将差距输入为 D5Delta 的数值。如果非标准探针较长,请输入负数的 D5Delta 的数值。非标准探针较短时,请输入正数的 D5Delta 数值。
-
在更换探针前,请确定标准点探针是放在归位点 (插入探针归位座),才打开 MicroScribe 的电源。安装非标准点探针时打开 MicroScribe 的电源会导致在 Rhino 里反馈的数据不正确。
Faro 测量手臂疑难排解
在 Faro 硬体设置对话框中将 Trigger Mode 从 Internal (标准) 改为 External 会让 Rhino 当掉。
目前并无法修正这个错误。
相关指令
| 工具列 | 功能表 |
|---|---|
|
|
|

DigBeep 指令打开或关闭量测手臂取点时的音效。
步骤
- 按打开或关闭选项。
| 工具列 | 功能表 |
|---|---|
|
|
工具 3‑D 测量手臂 > 校正 |
DigCalibrate 指令可以校正 3D 量测手臂。
步骤
- 在实体模型上或附近取一点为原点,此点为测量手臂的座标系统原点。
- 在实体模型上或附近取另一点,定义 X 轴的方向,此点为量测手臂的座标系统的 X 轴上的一点。
- 在实体模型上或附近取第三点,定义 Y 轴的方向,此点为量测手臂的座标系统的 Y 轴上的一点。
在您所取的三个点的平面上,Rhino 会自动使您定义的 Y 轴与 X 轴垂直,所以您在给量测手臂定义 Y 轴时不必刻意使它与 X 轴垂直。 - 在 Rhino 里取一点为原点,测量手臂座标系统的原点会与此点对应。
- 如果您想让测量手臂的座标系统与 Rhino 里的世界座标系统对应,按 Enter 即可。
- 在 Rhino 里取另一点,定义 X 轴的方向,量测手臂座标系统的 X 轴会对应至这个方向。
- 在 Rhino 里取第三点,定义 Y 轴的方向,量测手臂座标系统的 Y 轴会对应至这个方向。
重新校正的方法
在测量过程中常常需要重新校正测量手臂,使 Rhino 的模型空间与真实世界保持同步。有时候因为测量手臂或被测量的物件受到碰撞而轻微位移,或是在某个运行阶段结束后需要关闭 Rhino,都需要重新校正测量手臂。不论是什么原因导致需要重新校正测量手臂,设定几个重新校正时需要用到的参考点会非常有用。
概观
- 将测量手臂与被测量的物件固定在工作桌上。
- 校正测量手臂,使被测量的物件可以正确地定位至 Rhino 的模型空间中。
- 在被测量的物件上标示三个参考点,这三个参考点可于需要重新校正测量手臂时使用。
- 测量这三个点,在 Rhino 的模型空间中放置三个对应点。
- 任何需要重新校正测量手臂时,都可以使用被测量物件上的三个参考点与 Rhino 模型空间中的三个对应点来校正测量手臂。
第一次校正
- 以测量手臂在工作桌上取一点为原点。
- 以量测手臂在工作桌上再取一点,定义 X 轴的方向。
- 以量测手臂在工作桌上取第三点,定义 Y 轴的方向。
- 按 Enter 键将原点映射到世界坐标系。
建立参考点
重新校正测量手臂
- 以量测手臂在被量测物件上的 O 取一点为原点。
- 以量测手臂于被量测物件上的 X 取一点,定义 X 轴。
- 以量测手臂于被量测物件上的 Y 取一点,定义 Y 轴。
- 在 Rhino 里,锁定多重曲线上的顶点 O,对应被量测物件上的原点。
- 在 Rhino 里,锁定多重曲线的端点 X,对应被量测物件上的 X 轴。
- 在 Rhino 里,锁定多重曲线的端点 Y,对应被量测物件上的 Y 轴。
| 工具列 | 功能表 |
|---|---|
|
|
|
DigCamera 指令以量测手臂探针的位置与方向 (I、J、K 座标系统) 设定使用中工作视窗的视图摄影机的位置与方向。
| 指令行选项 | |
|---|---|
|
公差 |
探针移动多少距离后才会开始带动视图变更。 |
| 工具列 | 功能表 | 快捷键 |
|---|---|---|
|
|
|
F12 |
DigClick 指令可以代替踩脚踏板取点的动作以量测手臂取点。
步骤
- 给 DigClick 指令设定一个功能键 (例如:F12),按下此功能键就等同于踩下脚踏板。
| 工具列 | 功能表 |
|---|---|
|
|
工具 3-D 测量手臂 > 离线 |
DigDisconnect 指令使 3D 量测手臂离线。
| 工具列 | 功能表 |
|---|---|
|
|
工具 3‑D 量测手臂 法线 |
DigLine 指令使用量测手臂的探针在物件上取一点,以探针取的点及探针的方向建立一条直线。
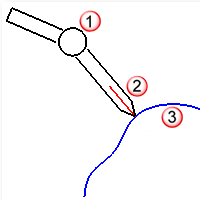
探针 (1)、直线 (2)、物件 (3)。
步骤
- 以测量手臂的探针在物件上指定一点为直线的起点。
建立一条以探针的尖端为起点,探针的方向为向量的逆向直线。
| 指令行选项 | |
|---|---|
|
长度 |
设定直线的长度。 |
| 工具列 | 功能表 |
|---|---|
|
|
工具 3‑D 测量手臂 > 暂停 |
DigPause 指令暂停 3D 量测手臂使它不影响鼠标的操作。
| 工具列 | 功能表 |
|---|---|
|
|
工具 3‑D 测量手臂 > 设置缩放比 |
DigScale 指令设置以量测手臂取点时的缩放比。
步骤
- 输入以测量手臂取点时的缩放比。
以公尺为测量单位,请输入 0.0254。
以公分为测量单位,请输入 2.54。
以毫米为测量单位,请输入 25.4。
| 工具列 | 功能表 |
|---|---|
|
|
工具 3‑D 测量手臂 > 平面断面曲线 |
DigSection 指令使用 3D 量测手臂建立平面的断面曲线。
步骤
- 画出基准平面。
请参考 Rectangle 指令的选项说明。
基准平面是一个所有断面都会与它平行的平面,放置数个测量平面可以快速地建立被测量物件的断面曲线。每当测量手臂的探针通过测量平面时,Rhino 就会取一个点。
测量平面是由一个基准点、方向及间距所定义,所有测量平面会与基准点与方向点所构成的方向垂直。 - 指定断面轴的起点。
第一个断面会通过断面轴的起点。 - 指定断面轴的终点与设定间距。
您可以设定断面与断面之间的间距,也可以设定有几个断面平均分布于断面轴的起点与终点之间。 - 以测量手臂探针接触被测量的物件,并踩住脚踏板。
踩住脚踏板时,只要测量手臂的探针通过一个断面,Rhino 就会取一个点。当您要让测量手臂探针离开物件时,可以暂时放开脚踏板,避免 Rhino 建立一些无用的取样点,要再开始取点时可以再次踩住脚踏板。 - 完成后按 Enter 键。
结束测量物件时,每个测量平面都会建立一条通过测量点的曲线。此时,测量点还处于选取状态下,您可以将这些点移动至其它图层或将它们删除。
| 指令行选项 | |
|---|---|
|
工作平面位置 |
平均间隔平面数 = <数值> 间隔距离平面间距 = <数值> |
|
点距 |
设定点之间的最小距离。 |
|
点 |
描绘时建立点。 |
|
曲线 |
描绘时建立曲线。 |
|
多重直线 |
描绘时建立多重直线。 |
| 工具列 | 功能表 |
|---|---|
|
|
工具 3‑D 测量手臂 > 描绘曲线 |
DigSketch 指令使用 3D 量测手臂描绘曲线。
步骤
- 移动量测手臂探针到您想要开始量测的点,踩住脚踏板,将探针贴着物件,沿着事先在物件上画好的路径移动。
- 建立曲线时,按 C 可以建立封闭曲线。
| 指令行选项 | |
|---|---|
|
点 |
描绘时建立点。 |
|
曲线 |
描绘时建立曲线。 |
|
多重直线 |
描绘时建立多重直线。 |
|
点距 |
设定点之间的最小距离。 |