Digitize
Digitize 指令可連線與初始化 3D 量測手臂。
使用 3D 量測手臂
- 選擇量測手臂的型號。
- 使用量測手臂在真實世界中取一點為原點。
- 使用量測手臂在真實世界取另外一個點,定義 X 軸的方向。
- 使用量測手臂在真實世界再取一點,定義 Y 軸的方向。
您不必在意指定的 Y 軸是否與 X 軸垂直,Rhino 會自動使 Y 軸與 X 軸垂直。
- 在 Rhino 裡取一點為原點。
- 按 使用世界座標系統。
- 在 Rhino 裡取另一點,定義 X 軸的方向。
- 在 Rhino 裡取再取一點,定義 Y 軸的方向。
其它可與量測手臂配合使用的指令
無論什麼時候,只要 Rhino 提示您取一點的時候就可以使用量測手臂。因此,所有在曲線功能表裡的指令都可以用量測手臂為輸入裝置。您可以使用量測手臂畫直線、圓弧、圓、曲線...,就如同使用滑鼠一樣。
代替腳踏板
DigClick 指令可模擬踩下腳踏板取點的動作,F12 預設為此指令的快速鍵,如果您覺得按 F12 取點比使用腳踏板方便,您可以使用 F12 代替腳踏板。
量測大型物件
量測大型物件時,您可以先量測物件的一部分,標示一些參考點,再量測下一部分,標示的參考點要同時位於兩個部分的量測範圍內。
設定參考點
- 在物件上標示參考點
- 以工作桌校正量測手臂。
- 量測第一、二組參考點。
- 移動量測手臂至第二、三組參考點之間,使量測手臂可以同時量測到第二、三組參考點。
- 以第二組參考點校正量測手臂。
- 量測第三組參考點。
- 以同樣的方法移動量測手臂至下一組參考點,直到可以量測整個物件。
在 MicroScribe 上使用非標準探針
如果您的 MicroScribe 使用的是非標準探針,必需依照下列的說明編輯 mstip.dat 檔,mstip.dat 檔案裡也有此編輯說明。
設定 MicroScribe 使用非標準探針
Faro 量測手臂當機
在 Faro 硬體設定對話框將 Trigger Mode 從 Internal (標準) 改為 External 會讓 Rhino 當掉。
此為目前無法修正的錯誤。
相關的指令
DigBeep 指令可開啟或關閉量測手臂取點時的嗶聲。
DigCalibrate 指令可用來校正 3D 量測手臂。
步驟
- 在實體模型上或附近取一點為原點,此點為量測手臂的座標系統原點。
- 在實體模型上或附近取另一點,定義 X 軸的方向,此點為量測手臂座標系統 X 軸上的一點。
- 在實體模型上或附近取第三點,定義 Y 軸的方向,此點為量測手臂座標系統 Y 軸上的一點。
在您所取的三個點的平面上,Rhino 會自動使您定義的 Y 軸與 X 軸垂直,所以您在給量測手臂定義 Y 軸時不必刻意使它與 X 軸垂直。
- 在 Rhino 裡取一點為原點,量測手臂座標系統的原點與此點對應。
- 如果您想讓量測手臂的座標系統與 Rhino 的世界座標系統對應,按 即可。
- 在 Rhino 裡取另一點,定義 X 軸的方向,量測手臂座標系統的 X 軸會對應至這個方向。
- 在 Rhino 裡取第三點,定義 Y 軸的方向,量測手臂座標系統的 Y 軸會對應至這個方向。
重新校正的方法
在量測過程中常常需要重新校正量測手臂,使 Rhino 的模型空間與真實世界保持同步。有時候因為量測手臂或被量測的物件受到碰撞而輕微位移,或是在某個作業階段結束後需要關閉 Rhino,都需要重新校正量測手臂。不論是什麼原因導致需要重新校正量測手臂,設定幾個重新校正時需要用到的參考點非常有用。
概觀
- 將量測手臂與被量測的物件固定在工作桌上。
- 校正量測手臂,使被量測的物件可以正確地定位至 Rhino 的模型空間。
- 在被量測的物件上標示三個參考點,這三個參考點可用來重新校正量測手臂。
- 量測這三個點,在 Rhino 的模型空間放置三個對應點。
- 任何需要重新校正量測手臂時,都可以使用被量測物件上的三個參考點與 Rhino 模型空間的三個對應點來校正量測手臂。
第一次校正
- 以量測手臂在工作桌上取一點為原點。
- 以量測手臂在工作桌上再取一點,定義 X 軸的方向。
- 以量測手臂在工作桌上取第三點,定義 Y 軸的方向。
- 按 將工作桌上的原點及 XY 軸與 Rhino 模型空間的世界座標系統對應。
建立參考點
- 使用油性筆在被量測的物件上標示出三個點。
- 標註這三個點為 O、X、Y,代表原點、X 軸、Y 軸。
- 執行 Polyline 指令。
- 以 X 為起點,經過 O 再到 Y 建立一條多重直線,此為重新校正時參考用的多重直線。
您可以將這條多重直線放到一個名為 "參考點" 的圖層,以便往後可以再次使用。
- 使用 Dot 指令,以註解點標註這條多重直線的兩個端點與頂點為 X、Y、O。
量測手臂或被量測的物件被移動或是需要重新啟動 Rhino 時,可以使用這些參考點重新校正量測手臂,使新量測的資料可以與之前量測的資料對齊。
重新校正量測手臂
- 以量測手臂在被量測物件上的 O 取一點為原點。
- 以量測手臂於被量測物件上的 X 取一點,定義 X 軸。
- 以量測手臂於被量測物件上的 Y 取一點,定義 Y 軸。
- 在 Rhino 裡,鎖定多重曲線的端點 O,對應被量測物件上的原點。
- 在 Rhino 裡,鎖定多重曲線的端點 X,對應被量測物件上的 X 軸。
- 在 Rhino 裡,鎖定多重曲線的端點 Y,對應被量測物件上的 Y 軸。
DigCamera 指令以量測手臂探針的位置與方向 (I、J、K 座標系統) 設定使用中作業視窗視圖攝影機的位置與方向。
| 指令行選項 |
|
公差
|
探針移動多少距離後才會開始帶動視圖變更。
|
DigClick 指令可代替踩下量測手臂踏板取點的動作。
步驟
- 給 DigClick 指令設定一個功能鍵 (例如:F12),按下此功能鍵就等同踩下腳踏板。
DigDisconnect 可中斷 3D 量測手臂的連線狀態。
DigLine 指令可用量測手臂的探針在物件上取一點,以探針取的點與探針的方向建立一條直線。
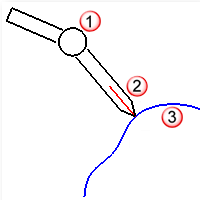
探針 (1)、直線 (2)、物件 (3)。
步驟
- 以量測手臂的探針在物件上一點為直線的起點。
建立一條以探針的尖端為起點,探針的方向為向量的逆向直線。
DigPause 可暫停 3D 量測手臂,使它不影響滑鼠的操作。
DigScale 指令可設定量測手臂取點時的縮放比。
步驟
- 輸入量測手臂取點時的縮放比。
以公尺為量測單位請輸入 0.0254。
以公分為量測單位請輸入 2.54。
以公釐為量測單位請輸入 25.4。
DigSection 可使用 3D 量測手臂建立平面的斷面曲線。
步驟
- 畫出基準平面。
請參考 Rectangle 指令的選項說明。
基準平面是一個所有斷面都會與它平行的平面,放置數個量測平面可以快速建立被量測物件的斷面曲線。每當量測手臂的探針通過量測平面時,Rhino 就會取一個點。
量測平面是由基準點、方向與間距定義,所有的量測平面都與基準點至方向點的方向垂直。
- 指定斷面軸的起點。
第一個斷面會通過斷面軸的起點。
- 指定斷面軸的終點與設定間距。
您可以設定斷面之間的距離,也可以設定有幾個斷面在斷面軸的起點與終點之間平均分布。
- 以量測手臂探針接觸被量測的物件並踩住腳踏板。
踩住腳踏板時,只要量測手臂的探針通過一個斷面,Rhino 就會取一個點。當您要讓量測手臂探針離開物件時,可以暫時放開腳踏板,避免 Rhino 建立一些無用的取樣點,要再開始取點時可以再次踩住腳踏板。
- 按 結束指令。
結束量測物件時,每個量測平面都會建立一條通過量測點的曲線。此時量測點還處於選取狀態下,您可以將這些點移到其它圖層或將它們刪除。
| 指令行選項 |
|
工作平面位置
|
平均間隔
平面數 = <數值>
間隔距離
平面間距 = <數值>
|
|
點距
|
設定點之間的最小距離。
|
|
點
|
描繪時建立點。
|
|
曲線
|
描繪時建立曲線。
|
|
多重直線
|
描繪時建立多重直線。
|
DigSketch 指令可用 3D 量測手臂描繪曲線。
步驟
- 移動量測手臂探針到您想要開始量測的點,踩住腳踏板,將探針貼著物件,沿著事先在物件上畫好的路徑移動。
- 按 C 可建立封閉的曲線。
| 指令行選項 |
|
三點
|
描繪時建立點。
|
|
曲線
|
描繪時建立曲線。
|
|
多重直線
|
描繪時建立多重直線。
|
|
點距
|
設定點之間的最小距離。
|
請參考
使用量測手臂
使用 MicroScribe 探針
Rhinoceros 7 © 2010-2022 Robert McNeel & Associates. 06-七月-2022

